Knowledge base Knowledge base for teams preparing AGV and AMR deployments
We collected resources on technology selection, safety, ROI and integrations to support early project conversations before the detailed process analysis stage.
Cost and ROI 6 min
What is the real cost of a forklift operator in Poland? 2025 calculation
Gross salary is only the starting point. Once employer contributions, absence, turnover and operating overhead are included, one forklift operator can cost PLN 8,500-9,200 per month.
Read article 
Architecture and integrations 8 min
RDS fleet management integration with SAP - how to connect AGV robots to an ERP system
A practical guide to connecting the RDS fleet manager with SAP ERP so transport orders, statuses and confirmations flow automatically.
Read article Architecture and integrations 6 min
What makes up an AGV system? Deployment architecture step by step
An overview of the AGV system layers: vehicles, fleet manager, integrations, infrastructure and operational support.
Read article Architecture and integrations 6 min
Integrating RDS (SEER) with SAP Warehouse Robotics
How to connect the RDS fleet manager with SAP so warehouse tasks can be executed by AGV in real time.
Read article Functional safety 5 min
The role of the safety encoder in AGV
Why a safety scanner alone is not enough and how the safety encoder influences AGV compliance with ISO 3691-4.
Read article Cost and operations 4 min
Energy and operating costs of AGV with a LiFePO4 battery
What energy use and day-to-day operating costs really look like for AGV with LiFePO4 batteries in warehouse and manufacturing operation.
Read article Functions and automation 4 min
Intelligent pallet placement in the shipping zone
How AGV can detect an available drop-off location and keep the shipping process moving in a dynamic dispatch area.
Read article System infrastructure 4 min
Infrastructure requirements for the KUKA.AMR Fleet system
An overview of the server, network and system requirements needed to run KUKA.AMR Fleet reliably.
Read article Integrations and standards 6 min
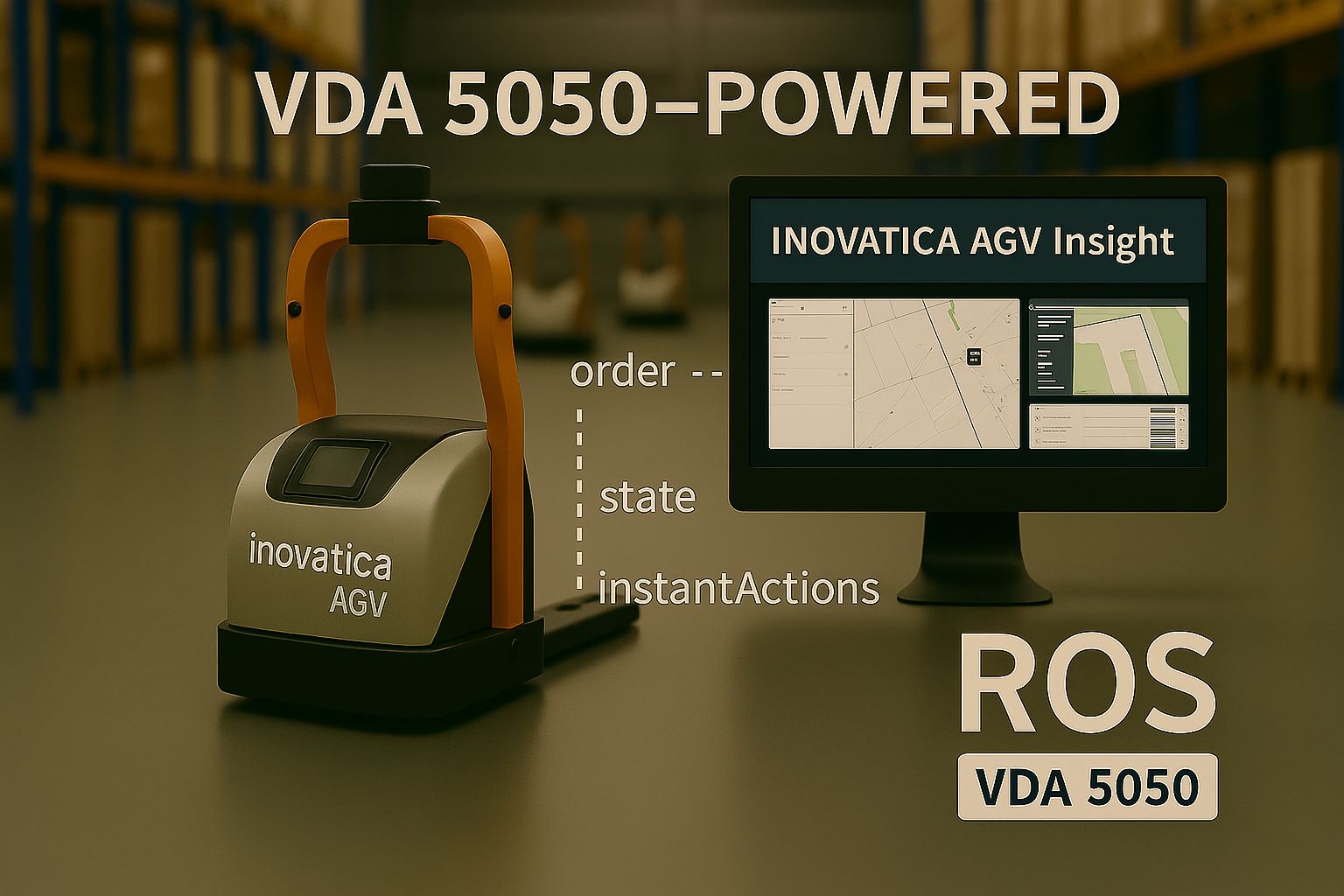
An autonomous forklift system based on the VDA 5050 protocol
A review of a project in which the VDA 5050 standard helped structure communication between the AGV fleet and a higher-level task management system.
Read article System architecture 5 min
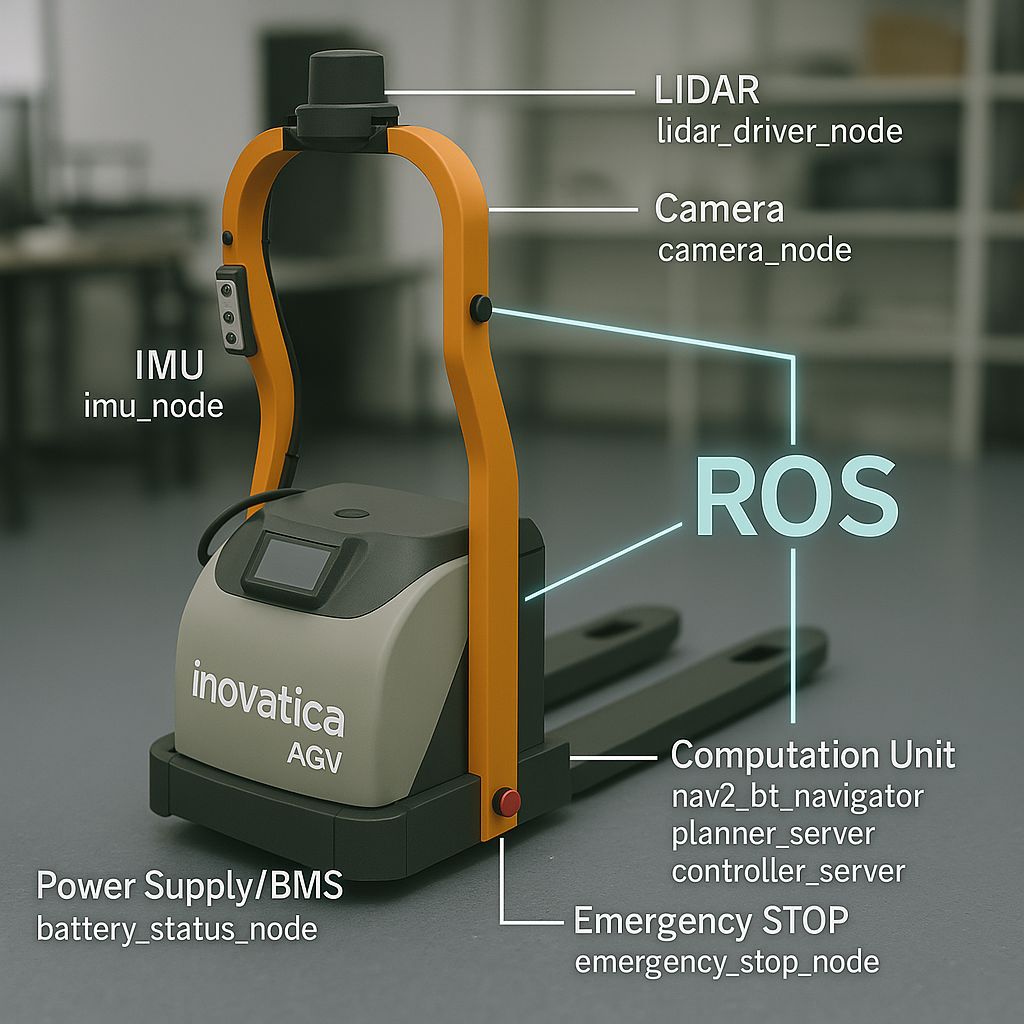
Case study: a ROS 2-based autonomous forklift system
How a ROS 2-based approach can help modernize existing forklifts and structure the development of autonomous functions.
Read article Perception and safety 5 min
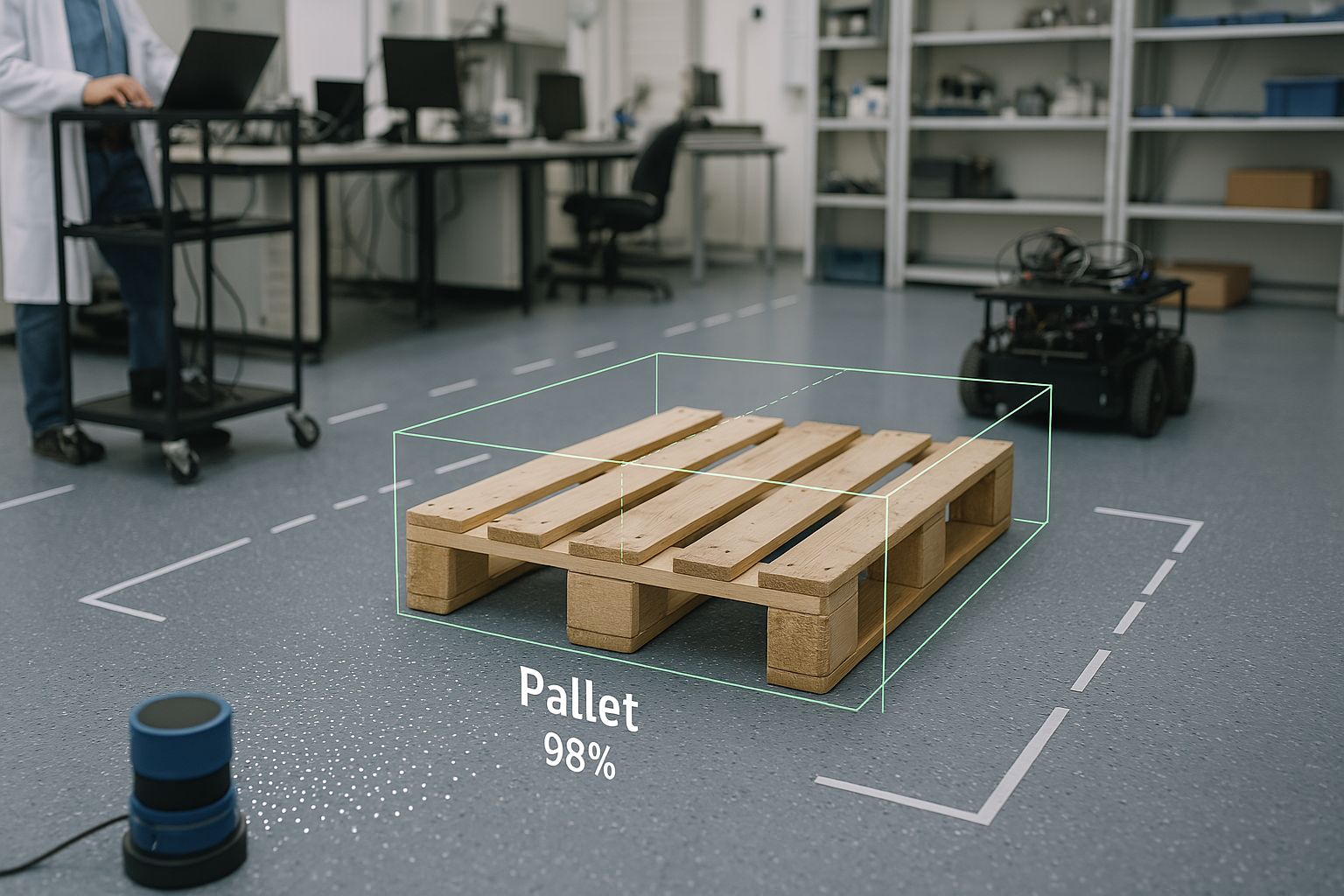
Pallet recognition system for autonomous forklifts
An example of how a vision-based system can improve pallet pick-up and drop-off performance in environments where pallet position is not always ideal.
Read article ROI and business case 7 min
AGV ROI: how to calculate return on investment in autonomous vehicles
The most important assumptions for AGV ROI calculation: investment cost, labor savings, safety and process throughput.
Read article Automation strategy 8 min
Mobile robots in warehouse intralogistics: expert analysis
An expert perspective on where AMR and AGV create the most value and what constraints should be assessed before deployment.
Read article Perception and safety 6 min
How an AI solution reduced warehouse accidents by 95%
An example of an AI system for detecting forklift forks that improved mixed-traffic safety and reduced the risk of collisions between AGV and manual vehicles.
Read article