Product TU-10 Horizontal transport
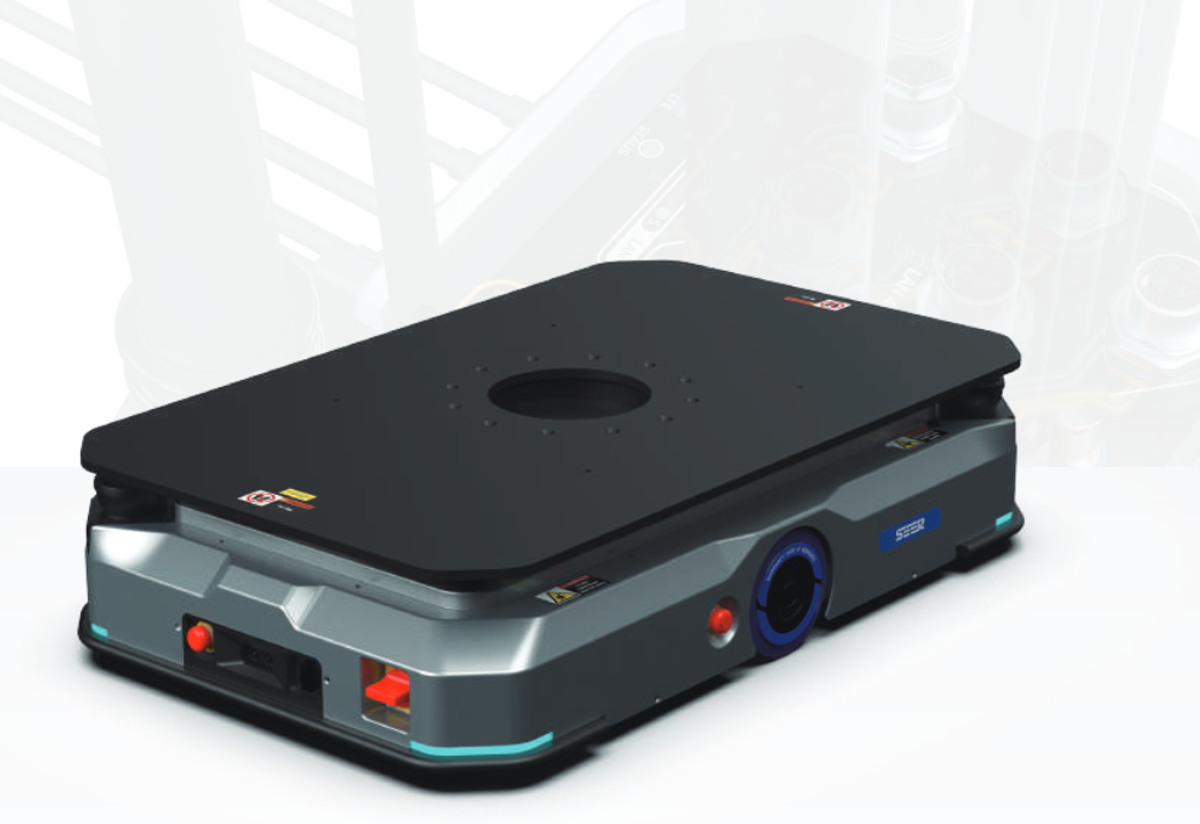
TU-10 AGV
TU-10 AGV supports larger internal logistics loops where one AMR (Autonomous Mobile Robot) can take over a major share of repetitive manual transport.
AMR (Autonomous Mobile Robot) for longer routes and larger transport sets.