11 kwietnia 2025
Baza wiedzy / Architektura systemu
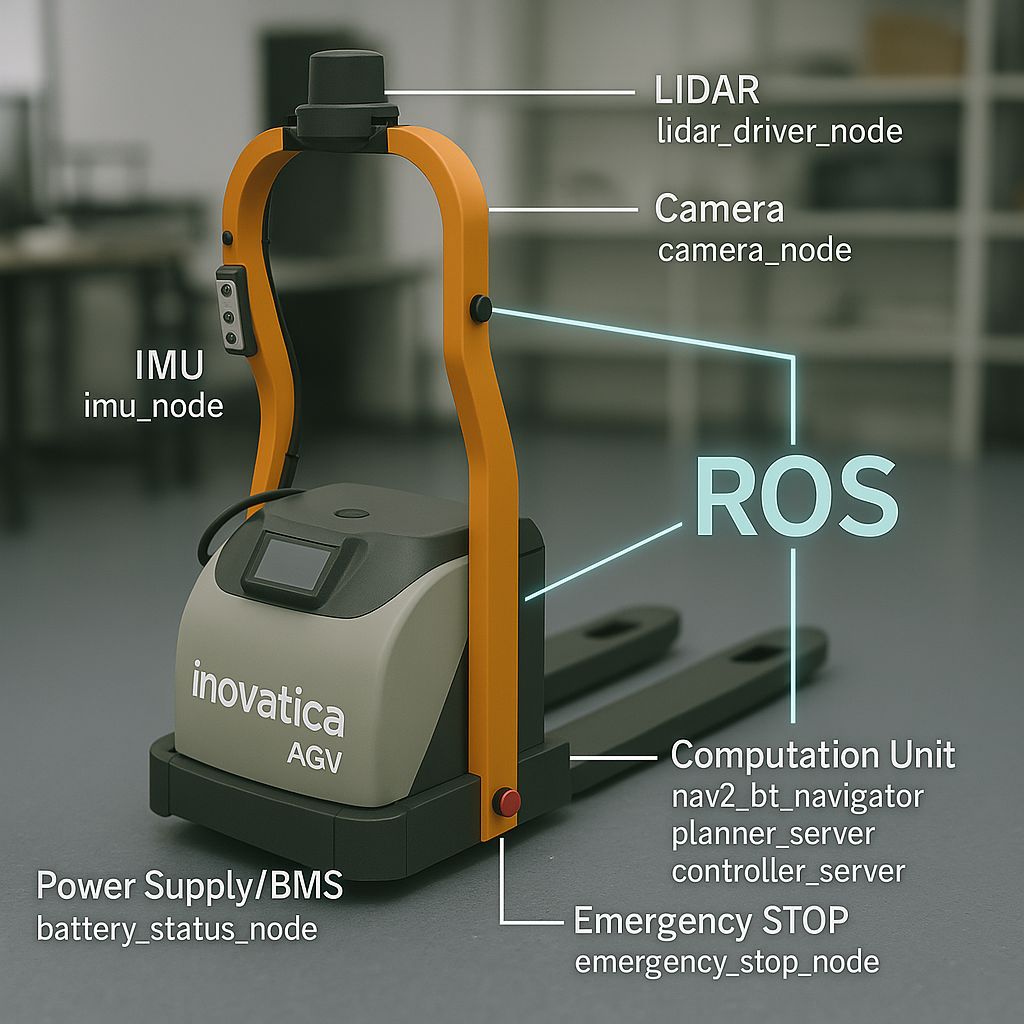
Studium przypadku: autonomiczny system wózka widłowego oparty na ROS 2
Jak podejście oparte na ROS 2 może pomóc unowocześnić istniejące wózki widłowe i uporządkować rozwój funkcji autonomicznych.
5 min
Dla zespołów, które chcą szybciej zrozumieć decyzje techniczne, bez czytania całego materiału od deski do deski.
Rozwój autonomicznych wózków widłowych nie zawsze oznacza konieczność budowy całego rozwiązania od zera. W wielu projektach biznesowo uzasadnione jest wykorzystanie istniejącej platformy sprzętowej i dołożenie warstwy autonomii, która pozwala wdrażać system szybciej oraz przy niższym koszcie wejścia.
Gdzie ROS 2 daje przewagę
ROS 2 dobrze sprawdza się tam, gdzie projekt wymaga wyraźnego podziału na moduły: percepcję, lokalizację, planowanie ruchu, sterowanie oraz diagnostykę. Dzięki temu łatwiej rozwijać funkcje etapowo i testować je w środowisku zbliżonym do produkcyjnego bez blokowania całego programu wdrożeniowego.
Dla biznesu kluczowe jest nie samo użycie frameworka, ale wynikający z niego porządek inżynierski. Zespół może szybciej iterować funkcje autonomiczne, utrzymać spójną komunikację między modułami i sprawniej przenosić rozwiązanie z fazy proof of concept do pracy operacyjnej.
Modernizacja zamiast wymiany całej floty
W scenariuszu modernizacji analizuje się stan istniejących pojazdów, dostępność sygnałów sterujących, przestrzeń na sensory i komputery pokładowe oraz wymagania bezpieczeństwa. Dopiero na tej podstawie można ocenić, czy retrofit ma sens techniczny i finansowy.
W wielu przypadkach taka ścieżka skraca czas dojścia do pierwszego wdrożenia. Jednocześnie wymaga dyscypliny projektowej: jasnego podziału odpowiedzialności, walidacji bezpieczeństwa i planu serwisowego po uruchomieniu systemu.
Co warto ocenić przed decyzją
Najważniejsze pytania dotyczą nie tylko oprogramowania, ale całego kontekstu pracy pojazdu: jakości nawigacji, powtarzalności tras, logiki pobrań i odłożeń oraz integracji z systemami zakładowymi. Jeśli te elementy są dobrze opisane, architektura oparta na ROS 2 może stać się solidnym fundamentem dla kolejnych iteracji produktu AGV.
Źródło uzupełniające:
Materiał pierwotny
![]()
Kolejny krok
Potrzebujesz przełożyć tę wiedzę na konkretny projekt?
Możemy wskazać, która technologia, architektura lub use-case AGV / AMR ma sens w Twoim procesie i od czego najlepiej zacząć.