
Transport poziomy 
HT-15 AGV
HT-15 AGV został zaprojektowany do powtarzalnego transportu ładunków na poziomie posadzki wszędzie tam, gdzie uporządkowana i przewidywalna trasa pozwala szybko uzyskać pierwszy efekt automatyzacji.
stałe trasy paletoweuzupełnianie buforówprzekazanie z przyjęcia do produkcji
Produkt jest przygotowany do wdrożenia w środowisku przemysłowym z uwzględnieniem wymagań oznaczenia CE, dokumentacji technicznej i procesu oceny zgodności dla bezpiecznej eksploatacji.
Karta produktowa HT-15
Kategoria: Transport poziomy
HT-15 AGV
Kompaktowy wózek AGV do powtarzalnego transportu palet po trasach na poziomie posadzki.
HT-15 AGV został zaprojektowany do powtarzalnego transportu ładunków na poziomie posadzki wszędzie tam, gdzie uporządkowana i przewidywalna trasa pozwala szybko uzyskać pierwszy efekt automatyzacji.
- stałe trasy paletowe
- uzupełnianie buforów
- przekazanie z przyjęcia do produkcji
Kluczowe parametry
| Parametr | Wartość |
|---|---|
| Nazwa produktu | Autonomiczny wózek widłowy |
| Typ operacji | Autonomiczny / ręczny |
| Typ nawigacji | Laser SLAM |
| Typ palety | Paleta otwarta |
| Maksymalny udźwig | 1500 kg |
| Odległość do środka ciężkości ładunku | 600 mm |
| Waga (z baterią) | 403 kg |
| Standardowa wysokość podnoszenia | 205 mm |
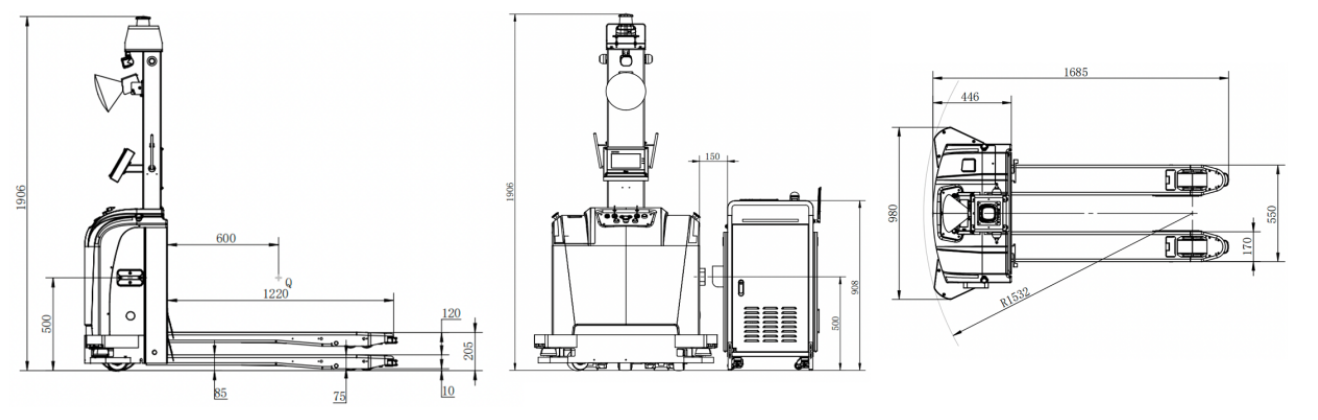
| Wymiary wózka widłowego (dł. x szer. x wys.) | 1685 x 980 x 1906 mm |
| Wymiary wideł (dł. x szer. x wys.) | 1220 x (170+7) x 75 mm (panel okablowania 7 mm) |
| Szerokość zewnętrzna wideł | 550 / 600 / 680 mm |
| Szerokość korytarza do składowania pod kątem prostym, paleta 800x1200 (1200 wzdłuż wideł) | 2220 mm |
Jak ocenić ten model
Gdzie HT-15 AGV ma największy sens biznesowy
Ten model warto oceniać w kontekście typu nośnika, powtarzalności trasy, wymaganej logiki podnoszenia i poziomu dyscypliny procesowej oczekiwanej od pierwszego etapu wdrożenia. Dobre dopasowanie do procesu zwykle daje więcej niż sam najlepszy parametr katalogowy.
Przed wyborem pojazdu porównaj nie tylko udźwig i geometrię, ale też punkty poboru i odkładania, strefy ruchu mieszanego, strategię ładowania oraz sposób, w jaki AGV ma zostać wpięte w rzeczywisty przepływ materiału.
stałe trasy paletowe, uzupełnianie buforów, przekazanie z przyjęcia do produkcji.
Sprawdź nośnik, układ posadzki, miejsce do skrętu, logikę przekazań oraz to, czy proces potrzebuje w pełni powtarzalnego routingu czy bardziej elastycznej orkiestracji zadań.
Pierwszy etap powinien potwierdzić stabilność operacyjną, bezpieczeństwo współpracy z obiektem i efekt biznesowy uzasadniający dalsze skalowanie floty.
Parametry HT-15 AGV
Parametr
Nazwa produktu
Wartość
Autonomiczny wózek widłowy
Parametr
Typ operacji
Wartość
Autonomiczny / ręczny
Parametr
Typ nawigacji
Wartość
Laser SLAM
Parametr
Typ palety
Wartość
Paleta otwarta
Parametr
Maksymalny udźwig
Wartość
1500 kg
Parametr
Odległość do środka ciężkości ładunku
Wartość
600 mm
Parametr
Waga (z baterią)
Wartość
403 kg
Parametr
Standardowa wysokość podnoszenia
Wartość
205 mm
Parametr
Wymiary wózka widłowego (dł. x szer. x wys.)
Wartość
1685 x 980 x 1906 mm
Parametr
Wymiary wideł (dł. x szer. x wys.)
Wartość
1220 x (170+7) x 75 mm (panel okablowania 7 mm)
Parametr
Szerokość zewnętrzna wideł
Wartość
550 / 600 / 680 mm
Parametr
Szerokość korytarza do składowania pod kątem prostym, paleta 800x1200 (1200 wzdłuż wideł)
Wartość
2220 mm
Parametr
Szerokość korytarza do składowania pod kątem prostym, paleta 1000x1000 (1000 wzdłuż wideł)
Wartość
2230 mm
Parametr
Szerokość korytarza do składowania pod kątem prostym, paleta 1000x1200 (1200 wzdłuż wideł)
Wartość
2260 mm
Parametr
Minimalny promień skrętu
Wartość
1532 mm
Parametr
Zakres temperatury otoczenia
Wartość
0°C do 50°C
Parametr
Zakres wilgotności otoczenia
Wartość
10% do 90%, ciśnienie normalne, brak kondensacji
Parametr
Prędkość jazdy (pełne obciążenie / bez obciążenia)
Wartość
1,4 / 1,4 m/s
Parametr
Przejezdność (nachylenie / próg / szczelina)
Wartość
<5% / 10 mm / 30 mm
Parametr
Dokładność pozycjonowania nawigacji
Wartość
±10 mm
Parametr
Dokładność kąta nawigacji
Wartość
±1°
Parametr
Specyfikacja baterii
Wartość
48 V / 46 Ah (LiFePO4)
Parametr
Czas pracy na baterii
Wartość
8 do 10 h
Parametr
Czas ładowania (10% do 80%)
Wartość
1 h
Parametr
Metoda ładowania
Wartość
Ręczna / Automatyczna
Parametr
Liczba lidarów
Wartość
1x P+F + 2x SICK
Parametr
Wi-Fi roaming
Wartość
Standard
Parametr
Unikanie przeszkód 3D
Wartość
Standard
Parametr
Rozpoznawanie palet
Wartość
Standard
Parametr
Przycisk awaryjny (E-stop)
Wartość
Standard
Parametr
Sygnalizacja dźwiękowa i świetlna
Wartość
Standard
Parametr
Droga hamowania (1 m/s / 1,5 m/s)
Wartość
1 m / 2 m
Parametr
Ochrona wysokości wideł
Wartość
Standard
Parametr
ISO 3691-4
Wartość
Standard
Parametr
EMC / ESD
Wartość
Standard
Parametr
UN38.3
Wartość
Standard
Parametr
RED
Wartość
Standard
Wymiary
Jak ocenic ten model
Gdzie HT-15 AGV ma najwiecej sensu
Ten pojazd warto oceniac w kontekscie typu nosnika, powtarzalnosci trasy, wymaganej logiki pobrania i odlozenia oraz poziomu dyscypliny procesowej oczekiwanej na pierwszym etapie wdrozenia. Dobre dopasowanie do realnego przeplywu zwykle daje lepszy efekt niz sam najmocniejszy parametr techniczny.
Przed wyborem modelu porownaj nie tylko udzwig i gabaryty, ale tez geometrie stanowisk, ruch mieszany, strategie ladowania i to, jak AGV ma laczyc sie z przeplywem poprzedzajacym i kolejnym etapem procesu. To ulatwia szybkie przejscie od shortlisty do sensownego pilota.
stałe trasy paletowe, uzupełnianie buforów, przekazanie z przyjęcia do produkcji.
Sprawdz nosnik, warunki posadzki, promienie skretu, logike przekazania oraz to, czy proces wymaga sztywnej trasy czy bardziej elastycznej orkiestracji zadan.
Pierwsze uruchomienie powinno potwierdzic stabilnosc pracy, bezpieczna interakcje z otoczeniem i mierzalny efekt biznesowy uzasadniajacy dalsze skalowanie floty.
Checklista wyboru
Co sprawdzic, zanim ten pojazd trafi na krotka liste
Zanim przejdziesz dalej z jednym pojazdem, potwierdz rzeczywista geometrie stacji, stan nosnikow, oczekiwana logike oczekiwania i miejsce, w ktorym ladowanie moze odbywac sie bez obnizenia dostepnosci procesu. To zwykle eliminuje najczestsze rozjazdy miedzy atrakcyjna karta produktu a realiami zakladu.
Krotki etap walidacji pomaga tez ustalic, czy ten model ma byc przede wszystkim szybkim proof of value, czy od razu baza do dalszej rozbudowy systemu. Dzieki temu latwiej wybrac pojazd, ktory nie tylko ruszy poprawnie, ale tez nie zablokuje kolejnego kroku projektu.
Zweryfikuj zasady pobrania, odlozenia i buforowania zanim ostatecznie wybierzesz preferowany model.
Przejrzyj ruch mieszany, punkty blokowania korytarzy i okna dostepu, ktore realnie kształtuja wydajnosc trasy.
Wybierz pojazd, ktory najszybciej udowodni stabilnosc i mierzalny wplyw na proces w pierwszym etapie wdrozenia.
Powiązane modele
Pozostałe pojazdy w tej kategorii
Jeśli porównujesz jeszcze podejścia, te modele są najbliższymi alternatywami w ramach tej samej rodziny produktowej.

TU-4
TU-4 AMR
Autonomiczna platforma transportowa AMR do obsługi linii i powtarzalnego transportu wieloprzystankowego.
Zobacz produkt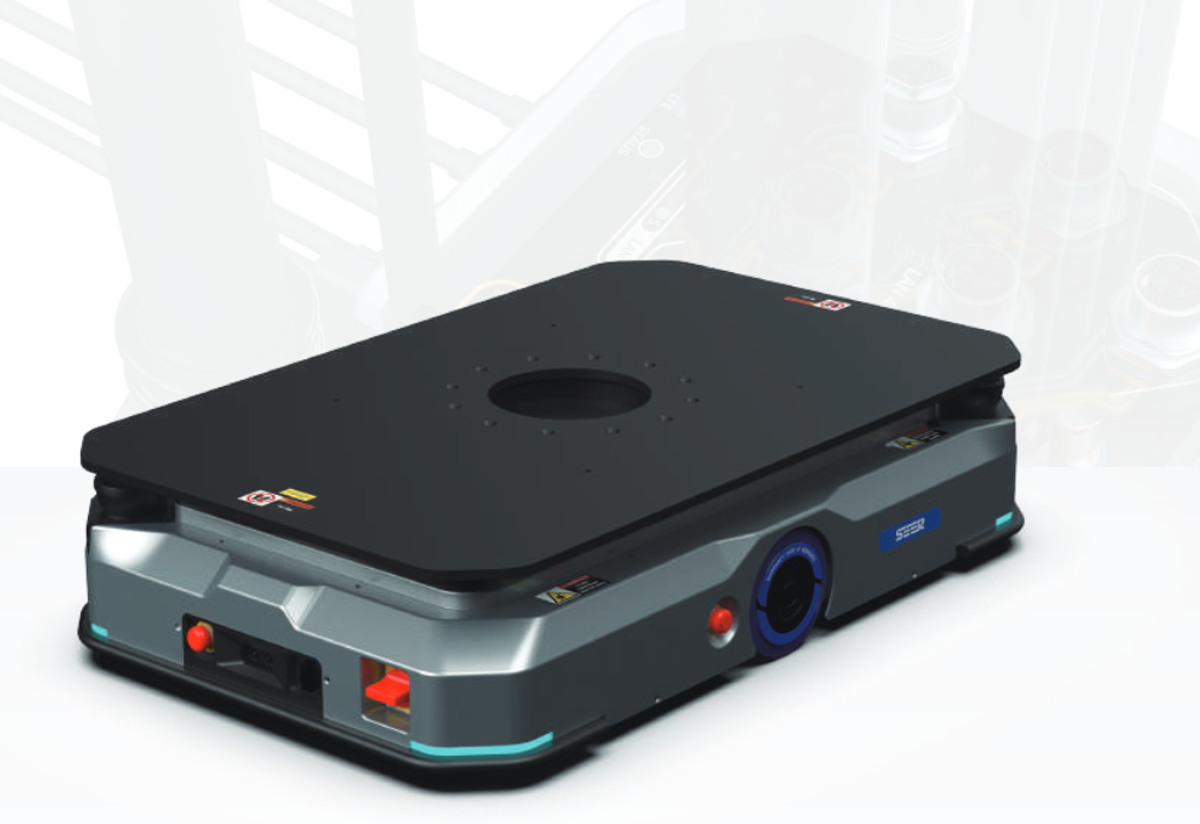
TU-6
TU-6 AMR
Autonomiczny robot mobilny AMR do poziomego transportu dedykowanych nośników w strefach o ograniczonej przestrzeni roboczej.
Zobacz produkt
TU-10
TU-10 AMR
Autonomiczna platforma transportowa AMR do dłuższych tras i większych zestawów transportowych.
Zobacz produkt Kolejne kroki
Kolejne kroki dla HT-15 AGV
Dobieramy zakres uruchomienia, wymagania integracyjne i model pracy systemu tak, aby pierwszy etap wdrożenia szybko potwierdził sens biznesowy projektu.