Client: Inovatica AGV (Internal R&D Project)
Industry: Robotics / Industrial Automation / Smart Logistics
🎯 The Challenge
The challenge was to retrofit existing forklifts with autonomous capabilities – without replacing entire fleets.
🧠 The Goal
Create a modular, scalable autonomous forklift system capable of navigating warehouse environments, detecting pallets, avoiding obstacles, and executing precise transport tasks – all without human intervention.
🛠️ Our Solution
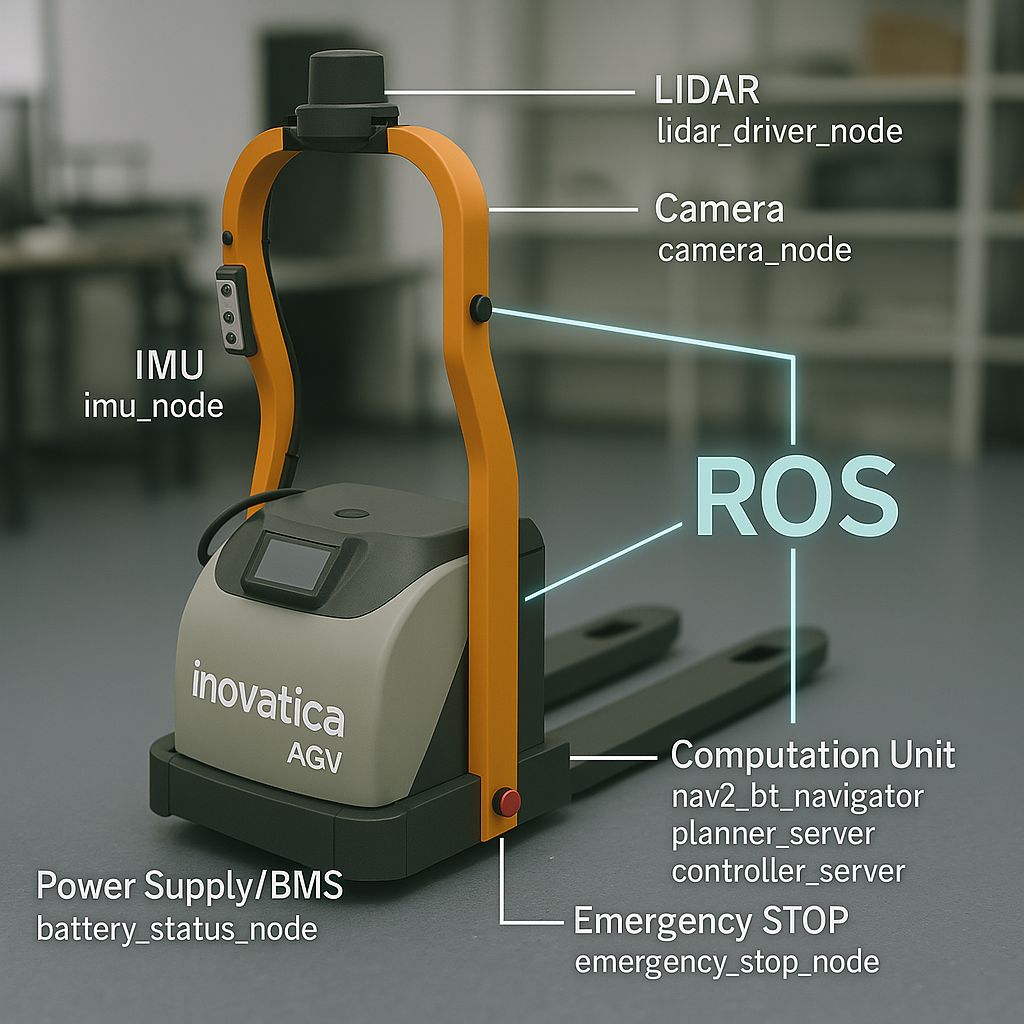
We developed a full-stack autonomous forklift platform using ROS2, the modern robotic middleware standard for high-performance industrial systems. Key system components:
✅ SLAM-based Navigation – Real-time mapping and localization using multiple LiDARs
✅ AI-Enhanced Perception – 3D vision + pallet detection for accurate load handling
✅ Multi-sensor Fusion – 5 lidars, a 3D camera, load sensors, linear potentiometers
✅ Custom ROS 2 Nodes – For safety, obstacle detection, and fork position control
✅ UI Integration – Touchscreen interface for mission monitoring and task adjustment
✅ Wireless Remote Control – Seamless fleet integration via ROS 2 communication layers
Our ROS 2 architecture allowed for precise motion planning, smooth navigation, and flexible task assignment – all managed through a single on-board computer unit.
📊 The Results
✅ +100% fleet upgradeability – System retrofitted to standard forklifts with no OEM lock-in
✅ Significant cost savings – No need to replace entire fleets to achieve autonomy
✅ Increased warehouse throughput – Consistent pallet handling and reduced idle time
✅ Plug-and-play AI/ROS modules – Ready for integration with WMS/MES platforms
🚀 We’re Your ROS 2 Software House
Looking for a partner to develop autonomous systems, fleet management tools, or perception modules in ROS 2?
🧩 We design and deliver custom ROS 2-based software for AGVs, AMRs, and industrial robotics – from low-level control to high-level AI integrations.
📩 Let’s build your next ROS 2 solution – together.